

GENIITEK-MG10產(chǎn)品路測定位速度+精度分析報告
普通GPS北斗模塊在環(huán)境復(fù)雜的城市環(huán)境中定位沒有那么精確,時常出現(xiàn)漂移、定位慢、無法定位等情況,比如在高架橋下,在穿山隧道里面,衛(wèi)星信號微弱或者完全沒有衛(wèi)星信號的環(huán)境中,GPS北斗模塊是沒辦法很好的定位的。這種情況下,選用GPS+慣性組合導(dǎo)航模塊就是比較好的選擇了!
近日,我司推出了最新的GPS北斗/格洛納斯+慣性組合導(dǎo)航模塊MG10, MG10模組融合了北斗高精度衛(wèi)星定位和慣性導(dǎo)航技術(shù),為復(fù)雜的城市環(huán)境提供組合導(dǎo)航,適用于各種形態(tài)車載終端導(dǎo)航系統(tǒng),在高架遮擋、山間隧道、城市峽谷、地下停車場等弱(無)衛(wèi)星信號覆蓋場景中,仍能通過慣性導(dǎo)航技術(shù)提供連續(xù)可靠的高精度定位導(dǎo)航體驗。同時,MG10 集成了千尋立見方便客戶在不同的應(yīng)用場景上使用。
衛(wèi)星+慣性組合導(dǎo)航充分利用慣性導(dǎo)航系統(tǒng)和衛(wèi)星導(dǎo)航系統(tǒng)優(yōu)點,基于最優(yōu)估計算法—卡爾曼濾波算法融合兩種導(dǎo)航算法,獲得最優(yōu)的導(dǎo)航結(jié)果;在衛(wèi)星信號微弱或者丟失衛(wèi)星信號的情況下,利用慣性導(dǎo)航系統(tǒng)使得導(dǎo)航系統(tǒng)繼續(xù)工作,保證導(dǎo)航系統(tǒng)的正常工作,提高了系統(tǒng)的穩(wěn)定性和可靠性。
MG10導(dǎo)航模塊提出了衛(wèi)星導(dǎo)航精度的智能識別算法,基于組合導(dǎo)航提供的高精度導(dǎo)航信息,對衛(wèi)星導(dǎo)航的定位精度進(jìn)行識別,如果衛(wèi)星導(dǎo)航精度較好,則進(jìn)行組合導(dǎo)航,一旦發(fā)現(xiàn)衛(wèi)星導(dǎo)航信號非常差甚至丟失信號,則進(jìn)行純慣性導(dǎo)航,總之,MG10導(dǎo)航模塊實現(xiàn)了組合導(dǎo)航和純慣性導(dǎo)航的自主切換。
下面為MG10產(chǎn)品路測+定位速度精度分析報告
1.測試路線
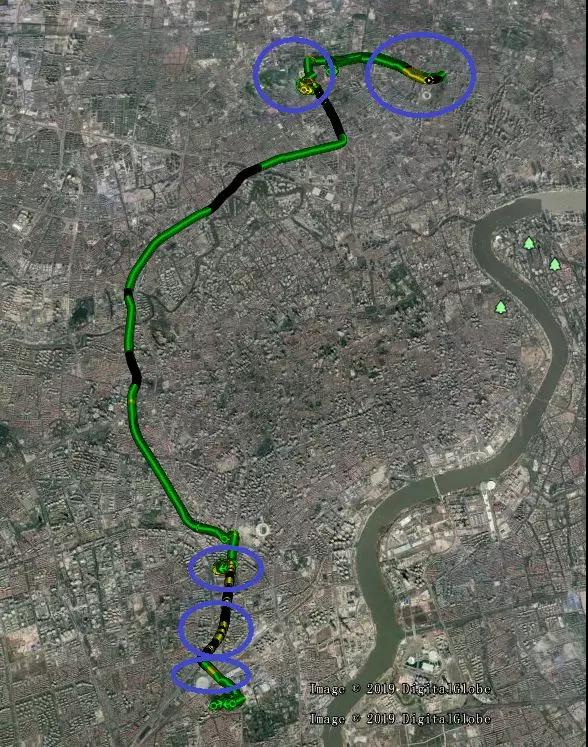
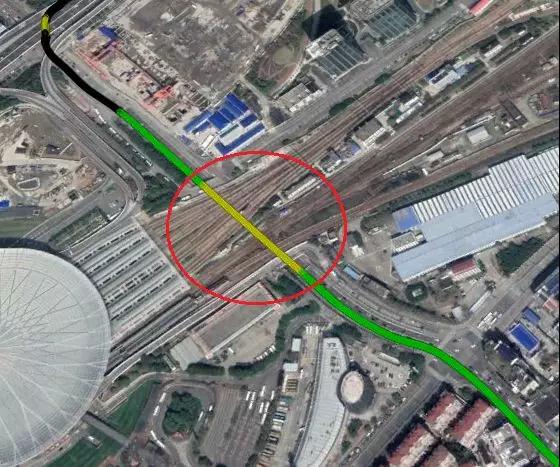
如圖所示,為了測試慣性導(dǎo)航模塊在定位和速度的性能,在五個復(fù)雜區(qū)域進(jìn)行了低速、高速、靜止、倒車和轉(zhuǎn)彎各種駕駛行為。
(1)區(qū)域1:某城市隧道
(2)區(qū)域2:某地下車庫
(3)區(qū)域3:某地下車庫
(4)區(qū)域4:某高架下
(5)區(qū)域5:某地道
2. 某隧道
2.1模塊的行駛軌跡

某隧道
某隧道
2.2模塊行駛速度
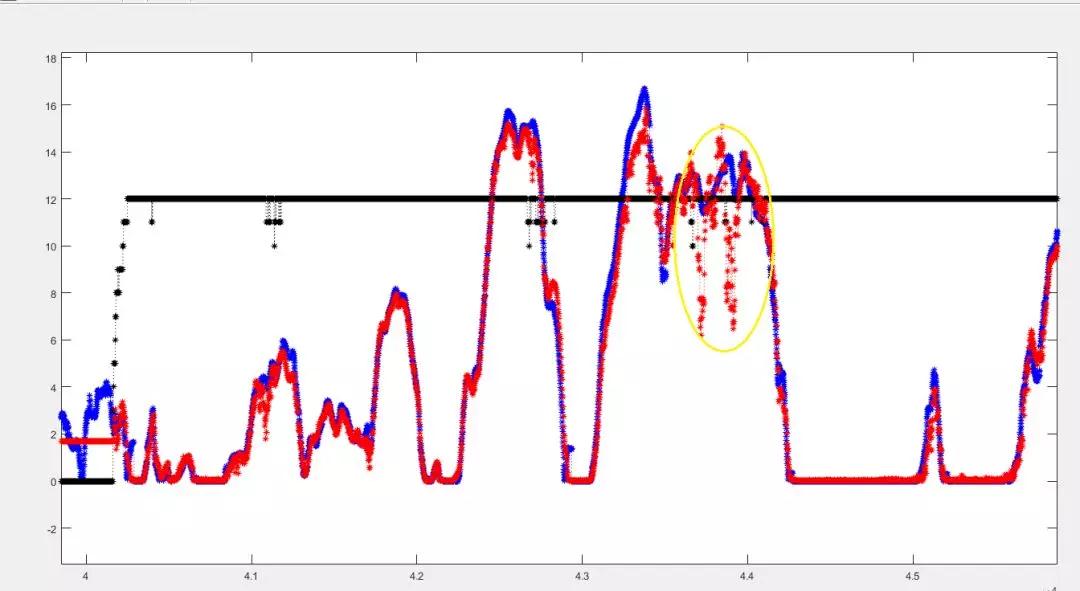
如圖所示:紅色為衛(wèi)星定位速度,藍(lán)色為慣性導(dǎo)航定位速度,黑色為衛(wèi)星數(shù)。
在兩次隧道內(nèi),慣性導(dǎo)航的速度都可以獲得較好的效果,尤其是出隧道的地方(黃色區(qū)域),衛(wèi)星導(dǎo)航速度恢復(fù)后,慣性導(dǎo)航的速度和衛(wèi)星導(dǎo)航速度非常接近,表明慣性導(dǎo)航速度的正確性。

3.某車庫
3.1模塊的行駛軌跡

某地下車庫
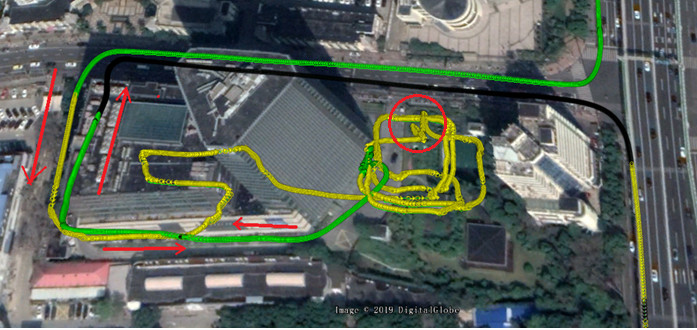
如圖所示,在車庫內(nèi),車輛進(jìn)行很多各種復(fù)雜的車輛駕駛行為:下坡、轉(zhuǎn)彎、倒車、低速、上坡、加速等等,尤其紅色區(qū)域,車輛在車庫內(nèi)倒車進(jìn)入一個車位,長期靜止。
通過上述駕駛行為,慣性導(dǎo)航還可以獲得非常好的車輛軌跡。尤其是在車庫的出口可以看出,車輛計入車庫和車輛出車庫的軌跡非常重合,說明了慣性導(dǎo)航性能的穩(wěn)定性。
3.2模塊行駛速度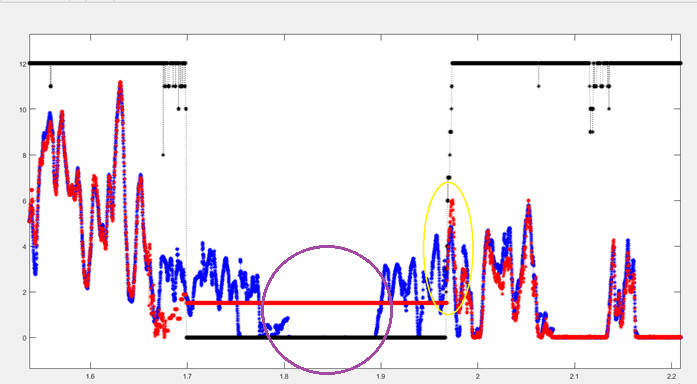
如圖所示:紅色為衛(wèi)星定位速度,藍(lán)色為慣性導(dǎo)航定位速度,黑色為衛(wèi)星數(shù)。
在某車庫內(nèi),慣性導(dǎo)航的速度都可以獲得較好的效果,尤其是出車庫的地方(黃色區(qū)域),衛(wèi)星導(dǎo)航速度恢復(fù)后,慣性導(dǎo)航的速度和衛(wèi)星導(dǎo)航速度非常接近,表明慣性導(dǎo)航速度的正確性。
另外,車輛倒車入庫,靜止在一個位置(紫色區(qū)域),車輛靜止,車速度為零。
4 某地下車庫
4.1模塊行駛軌跡
如圖所示,在車庫內(nèi),車輛進(jìn)行很多各種復(fù)雜的車輛駕駛行為:下坡、轉(zhuǎn)彎、倒車、低速、上坡、加速等等,尤其紅色區(qū)域,車輛在車庫內(nèi)倒車進(jìn)入一個車位,長期靜止。
4.2模塊行駛速度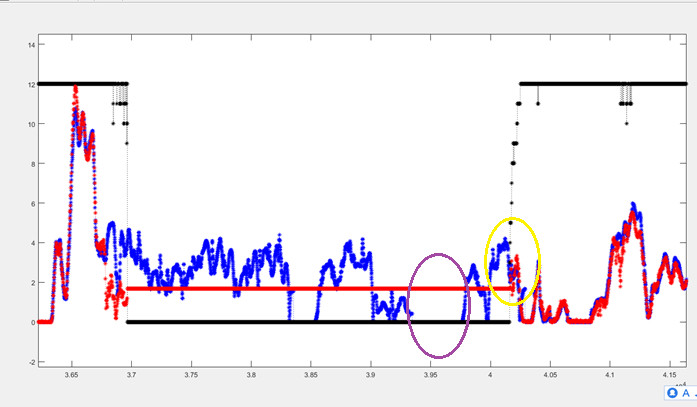
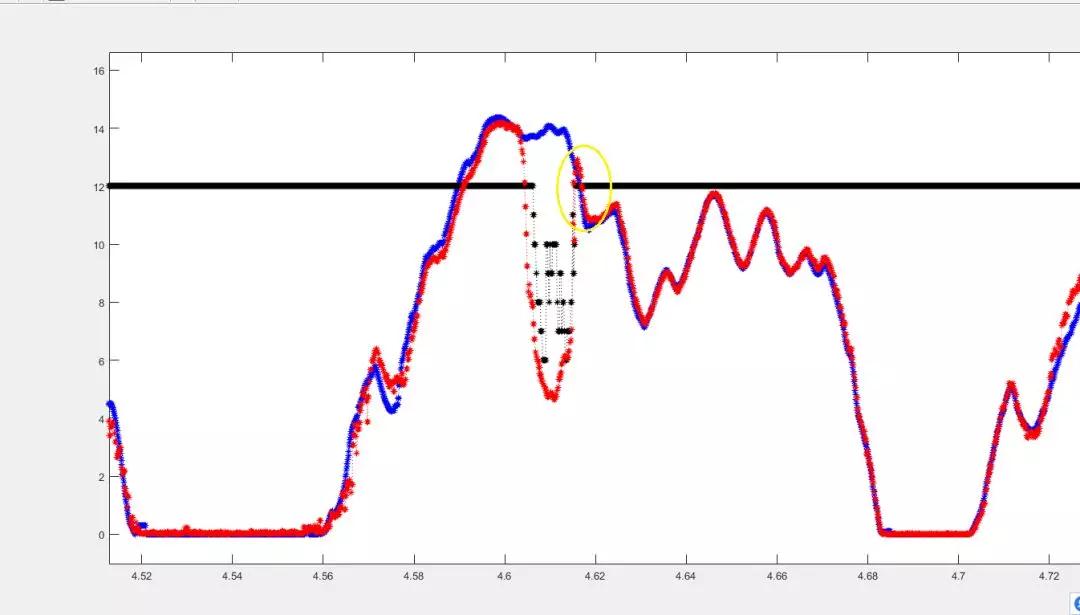
圖所示:紅色為衛(wèi)星定位速度,藍(lán)色為慣性導(dǎo)航定位速度,黑色為衛(wèi)星數(shù)。
在某的車庫內(nèi),慣性導(dǎo)航的速度都可以獲得較好的效果,尤其是出車庫的地方(黃色區(qū)域),衛(wèi)星導(dǎo)航速度恢復(fù)后,慣性導(dǎo)航的速度和衛(wèi)星導(dǎo)航速度非常接近,表明慣性導(dǎo)航速度的正確性。
另外,車輛倒車入庫,靜止在一個位置(紫色區(qū)域),車輛靜止,車速度為零。
5. 某高架下
5.1模塊行駛軌跡

如圖所示,在高架下,車輛比較多,有段非常擁堵,車輛進(jìn)行起步、加速、減速、靜止等各種駕駛行為,獲得較好定位效果。
5.2模塊速度信息
在高架下,車輛速度如圖所示,在遮擋非常嚴(yán)重的地方,可以看出,衛(wèi)星導(dǎo)航的車速會有非常大的抖動,誤差很大,而慣性導(dǎo)航的速度非常平滑,與真實車輛速度更加接近。
6. 某地道下
6.1 模塊軌跡
6.2模塊速度信息
7 小結(jié)
本次測試通過進(jìn)入隧道、車庫、高架下來驗證慣性導(dǎo)航的定位和測速的性能,總結(jié)如下:
(1)慣性導(dǎo)航模塊行駛軌跡和實際的車輛行駛軌跡非常接近;
(2)慣性導(dǎo)航模塊行駛速度和實際車速一致性非常高。
(3)在擁堵的高架下,模塊的定位和速度性能表現(xiàn)的都非常不錯。
首頁 | 關(guān)于我們 | 封裝服務(wù) | 技術(shù)與案例 | 新聞資訊 | 聯(lián)系我們 COPYRIGHT ? 2015-2018 捷研芯電子科技 ALL RIGHTS RESERVED POWER BY DEDECMS |
|

